8.3 Autoregressive models
In a multiple regression model, we forecast the variable of interest using a linear combination of predictors. In an autoregression model, we forecast the variable of interest using a linear combination of past values of the variable. The term autoregression indicates that it is a regression of the variable against itself.
Thus, an autoregressive model of order \(p\) can be written as \[ y_{t} = c + \phi_{1}y_{t-1} + \phi_{2}y_{t-2} + \dots + \phi_{p}y_{t-p} + e_{t}, \] where \(e_t\) is white noise. This is like a multiple regression but with lagged values of \(y_t\) as predictors. We refer to this as an AR(\(p\)) model.
Autoregressive models are remarkably flexible at handling a wide range of different time series patterns. The two series in Figure 8.5 show series from an AR(1) model and an AR(2) model. Changing the parameters \(\phi_1,\dots,\phi_p\) results in different time series patterns. The variance of the error term \(e_t\) will only change the scale of the series, not the patterns.
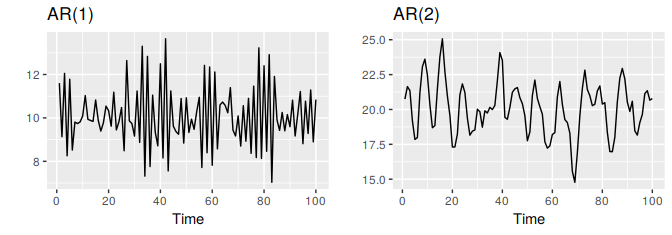
Figure 8.5: Two examples of data from autoregressive models with different parameters. Left: AR(1) with \(y_t = 18 -0.8y_{t-1} + e_t\). Right: AR(2) with \(y_t = 8 + 1.3y_{t-1}-0.7y_{t-2}+e_t\). In both cases, \(e_t\) is normally distributed white noise with mean zero and variance one.
For an AR(1) model:
- when \(\phi_1=0\), \(y_t\) is equivalent to white noise;
- when \(\phi_1=1\) and \(c=0\), \(y_t\) is equivalent to a random walk;
- when \(\phi_1=1\) and \(c\ne0\), \(y_t\) is equivalent to a random walk with drift;
- when \(\phi_1<0\), \(y_t\) tends to oscillate between positive and negative values;
We normally restrict autoregressive models to stationary data, in which case some constraints on the values of the parameters are required.
- For an AR(1) model: \(-1 < \phi_1 < 1\).
- For an AR(2) model: \(-1 < \phi_2 < 1\), \(\phi_1+\phi_2 < 1\),
When \(p\ge3\), the restrictions are much more complicated. R takes care of these restrictions when estimating a model.