Pendulum with Euler-Richardson ODE solver
Alfonso R. Reyes
2017-11-10
Define the ODE Solver: Pendulum with Euler-Richardson ODE solver
library(rODE)
# This code can also be found in the `examples` folder under this name:
#
# Pendulum.R
#
# Original Pendulum class uses Euler-Richardson solver
#
setClass("Pendulum", slots = c(
omega0Squared = "numeric",
state = "numeric",
odeSolver = "EulerRichardson"
),
prototype = prototype(
omega0Squared = 3,
state = c(0, 0, 0)
),
contains = c("ODE")
)
setMethod("initialize", "Pendulum", function(.Object) {
.Object@odeSolver <- EulerRichardson(.Object)
return(.Object)
})
setMethod("setStepSize", signature("Pendulum"), function(object, dt, ...) {
# use explicit parameter declaration
# setStepSize generic may use two different step parameters: stepSize and dt
object@odeSolver <- setStepSize(object@odeSolver, dt)
object
})
setMethod("step", "Pendulum", function(object) {
object@odeSolver <- step(object@odeSolver)
object@rate <- object@odeSolver@ode@rate
object@state <- object@odeSolver@ode@state
object
})
setMethod("setState", signature("Pendulum"), function(object, theta, thetaDot, ...) {
object@state[1] <- theta # angle
object@state[2] <- thetaDot # derivative of angle
# state[3] is time
object@odeSolver@ode@state <- object@state
object
})
setMethod("getState", "Pendulum", function(object) {
object@state
})
setMethod("getRate", "Pendulum", function(object, state, ...) {
object@rate[1] <- state[2] # rate of change of angle
object@rate[2] <- -object@omega0Squared * sin(state[1]) # rate of change dtheta
object@rate[3] <- 1 # rate of change of time, dt/dt
object@rate
})
# constructor
Pendulum <- function() new("Pendulum")## [1] "initialize"
## [1] "setStepSize"
## [1] "step"
## [1] "setState"
## [1] "getState"
## [1] "getRate"Run the application PendulumApp
# #############
# This code can also be found in the `examples` folder under this name:
#
# PendulumApp.R
#
PendulumApp <- function(verbose = FALSE) {
library(ggplot2)
ode <- new("ODE")
pendulum <- Pendulum()
dt <- 0.1
theta <- 0.2
thetaDot <- 0
pendulum@state[3] <- 0 # set time to zero, t = 0
pendulum <- setState(pendulum, theta, thetaDot)
pendulum <- setStepSize(pendulum, dt = dt) # using stepSize in RK4
pendulum@odeSolver <- setStepSize(pendulum@odeSolver, dt) # set new step size
rowvec <- vector("list")
i <- 1
while (pendulum@state[3] <= 1000) {
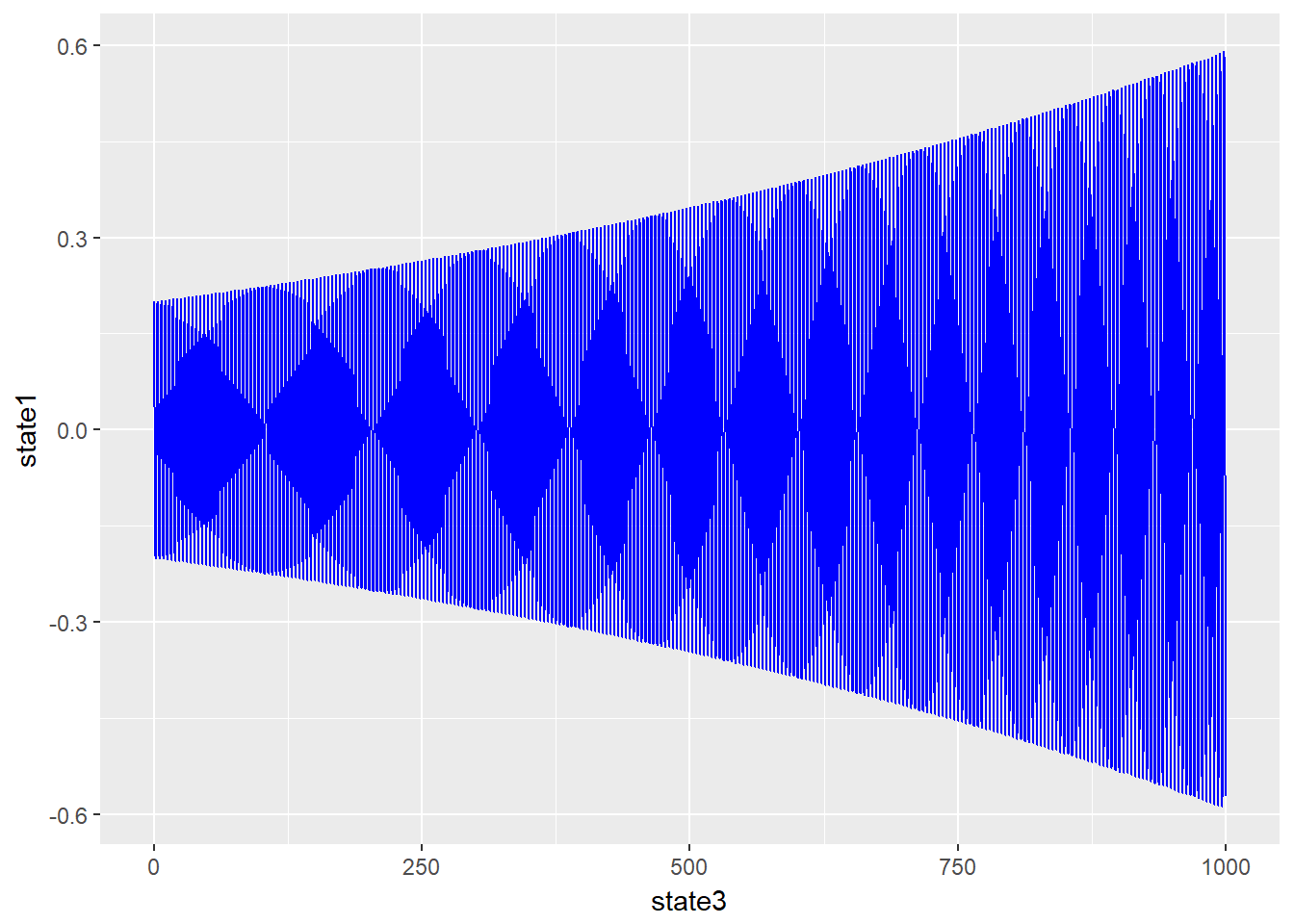
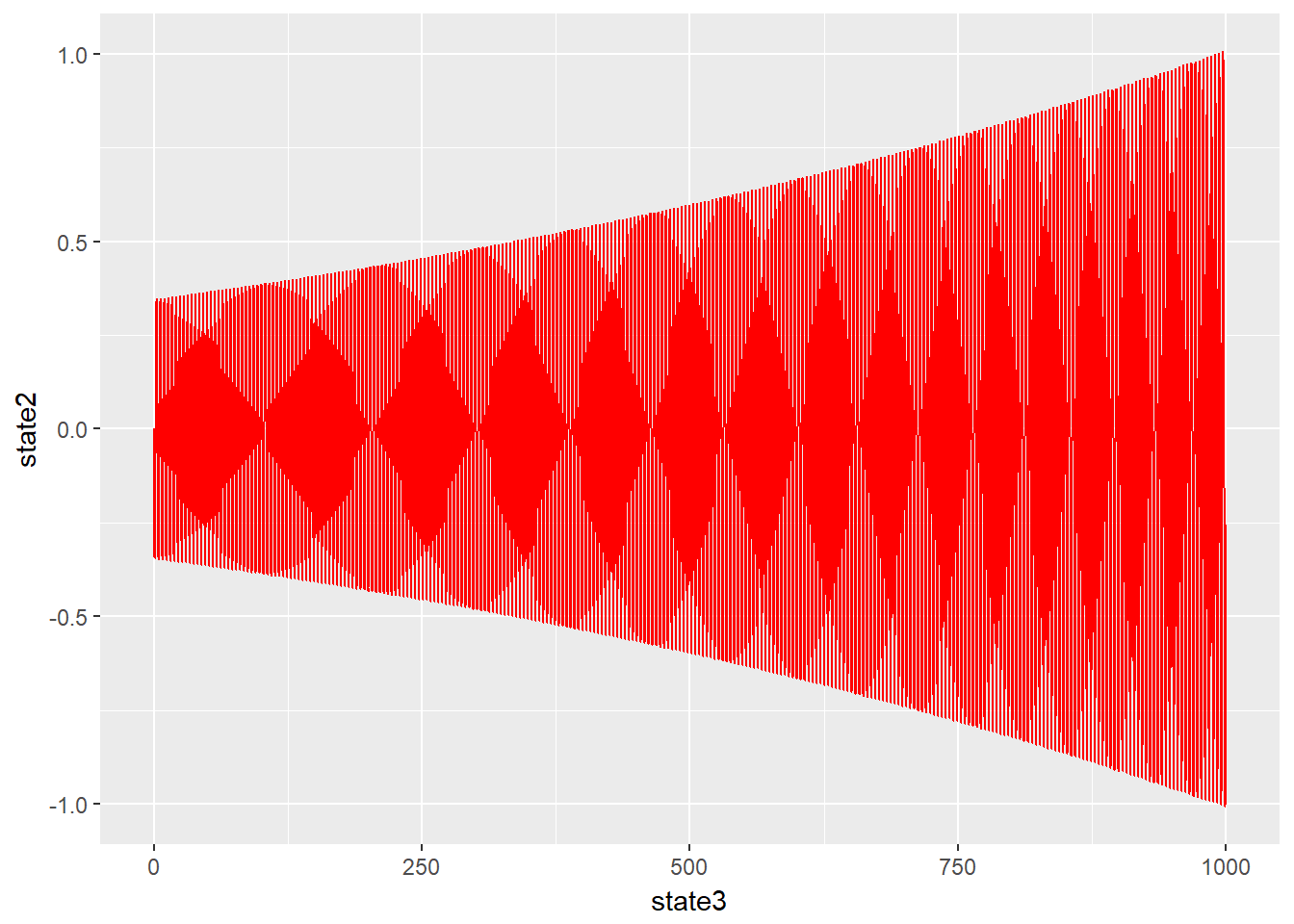
rowvec[[i]] <- list(state1 = pendulum@state[1], # angle
state2 = pendulum@state[2], # derivative of the angle
state3 = pendulum@state[3]) # time
if (verbose)
cat(sprintf("state1=%12f state2=%12f state3=%12f \n",
pendulum@state[1], pendulum@state[2], pendulum@state[3]))
i <- i + 1
pendulum <- step(pendulum)
}
DT.ER<- data.table::rbindlist(rowvec)
print(ggplot(DT.ER, aes(x = state3, y = state1)) + geom_line(col = "blue"))
print(ggplot(DT.ER, aes(x = state3, y = state2)) + geom_line(col = "red"))
# save(DTRK4, file = "./data/pendulumRK4_1e-3.rda")
}
PendulumApp()