setState
New setState that should work with different methods "theta", "thetaDot": used in PendulumApp "x", "vx", "y", "vy": used in ProjectileApp
setState(object, ...)
Arguments
| object | a class object |
|---|---|
| ... | additional parameters |
Examples
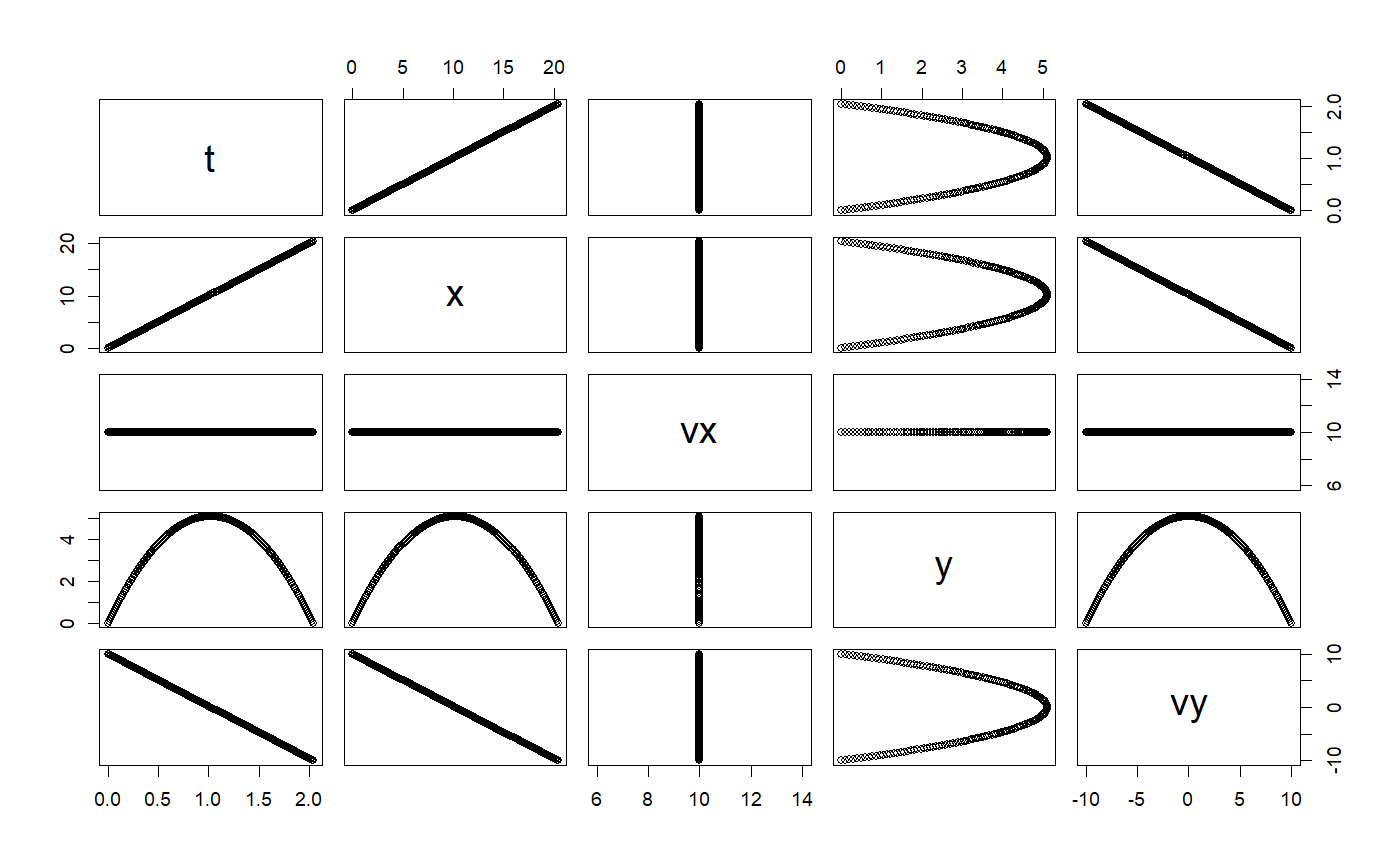
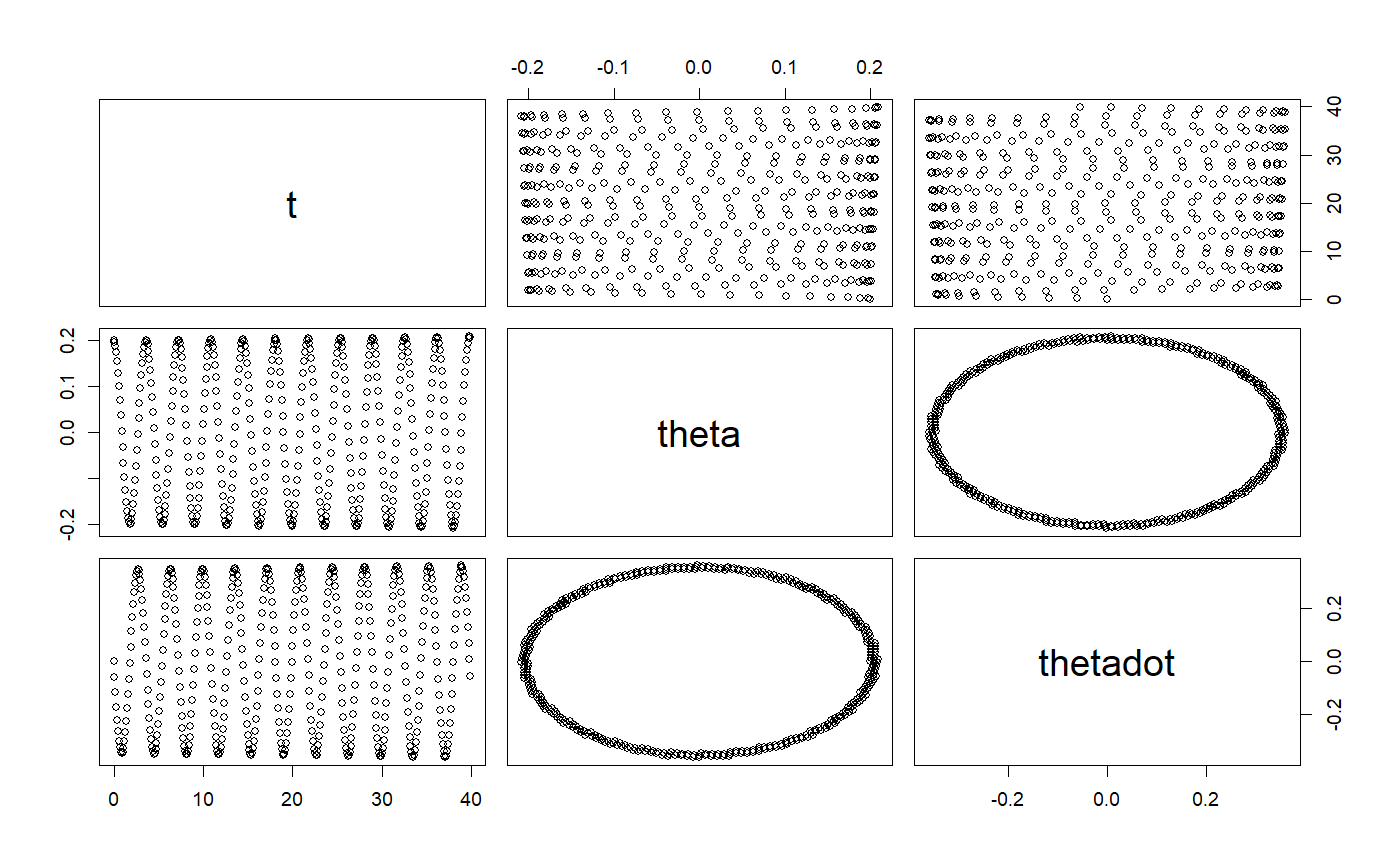
# +++++++++++++++++++++++++++++++++++++++++++++++++ application: ProjectileApp.R # test Projectile with RK4 # originally uses Euler # suppressMessages(library(data.table)) importFromExamples("Projectile.R") # source the class ProjectileApp <- function(verbose = FALSE) { # initial values x <- 0; vx <- 10; y <- 0; vy <- 10 state <- c(x, vx, y, vy, 0) # state vector dt <- 0.01 projectile <- Projectile() projectile <- setState(projectile, x, vx, y, vy) projectile@odeSolver <- init(projectile@odeSolver, 0.123) # init(projectile) <- 0.123 projectile@odeSolver <- setStepSize(projectile@odeSolver, dt) rowV <- vector("list") i <- 1 while (getState(projectile)[3] >= 0) { rowV[[i]] <- list(t = getState(projectile)[5], x = getState(projectile)[1], vx = getState(projectile)[2], y = getState(projectile)[3], # vertical position vy = getState(projectile)[4]) projectile <- step(projectile) i <- i + 1 } DT <- data.table::rbindlist(rowV) return(DT) } solution <- ProjectileApp()#>#>plot(solution)# ++++++++++++++++++++++++++++++++++++++++++++++++++ example: PendulumApp.R # Simulation of a pendulum using the EulerRichardson ODE solver suppressPackageStartupMessages(library(ggplot2)) importFromExamples("Pendulum.R") # source the class PendulumApp <- function(verbose = FALSE) { # initial values theta <- 0.2 thetaDot <- 0 dt <- 0.1 pendulum <- Pendulum() # pendulum@state[3] <- 0 # set time to zero, t = 0 pendulum <- setState(pendulum, theta, thetaDot) pendulum <- setStepSize(pendulum, dt = dt) # using stepSize in RK4 pendulum@odeSolver <- setStepSize(pendulum@odeSolver, dt) # set new step size rowvec <- vector("list") i <- 1 while (getState(pendulum)[3] <= 40) { rowvec[[i]] <- list(t = getState(pendulum)[3], # time theta = getState(pendulum)[1], # angle thetadot = getState(pendulum)[2]) # derivative of angle pendulum <- step(pendulum) i <- i + 1 } DT <- data.table::rbindlist(rowvec) return(DT) } # show solution solution <- PendulumApp() plot(solution)