doStep
Perform a step
doStep(object, ...)
Arguments
| object | a class object |
|---|---|
| ... | additional parameters |
Examples
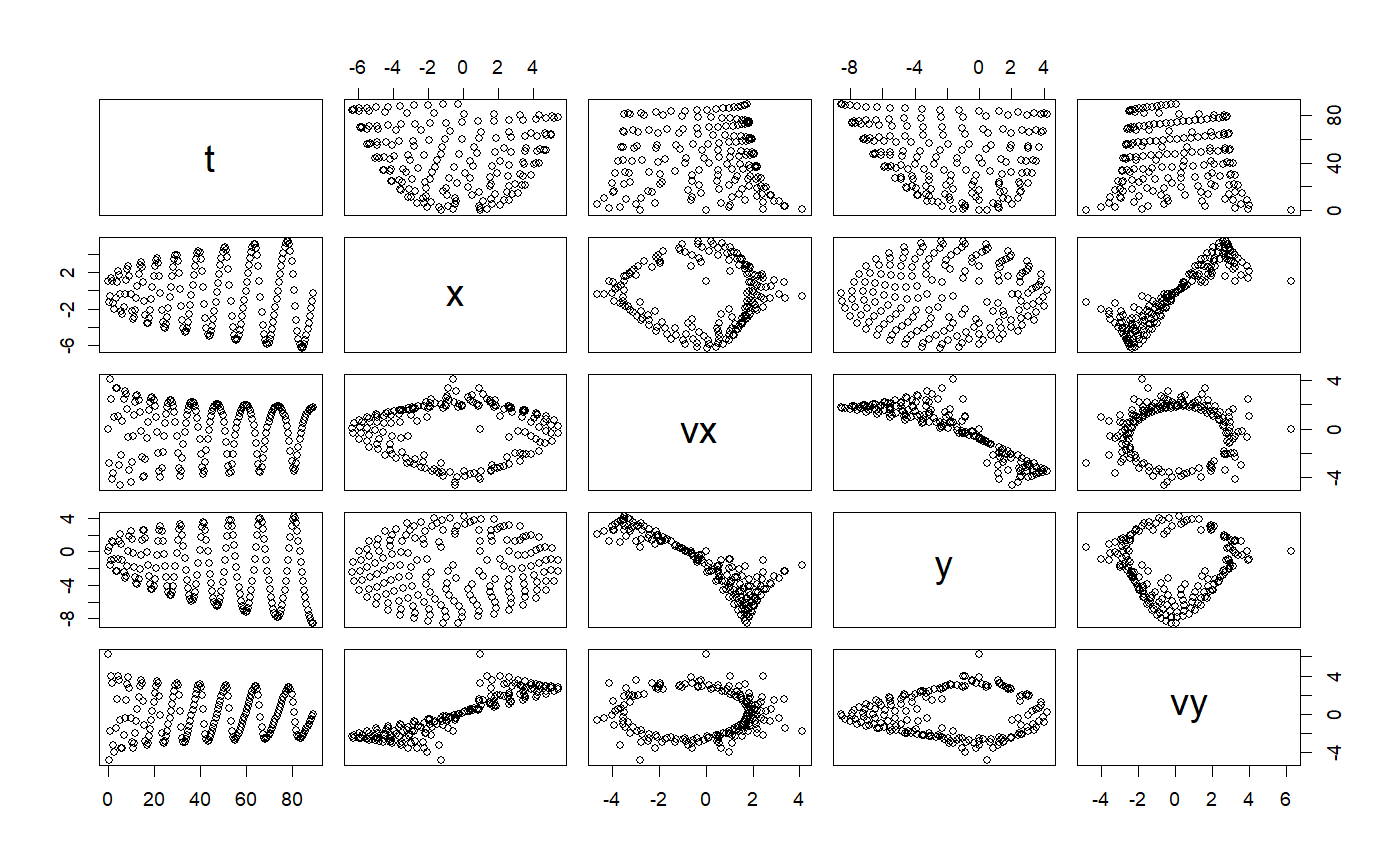
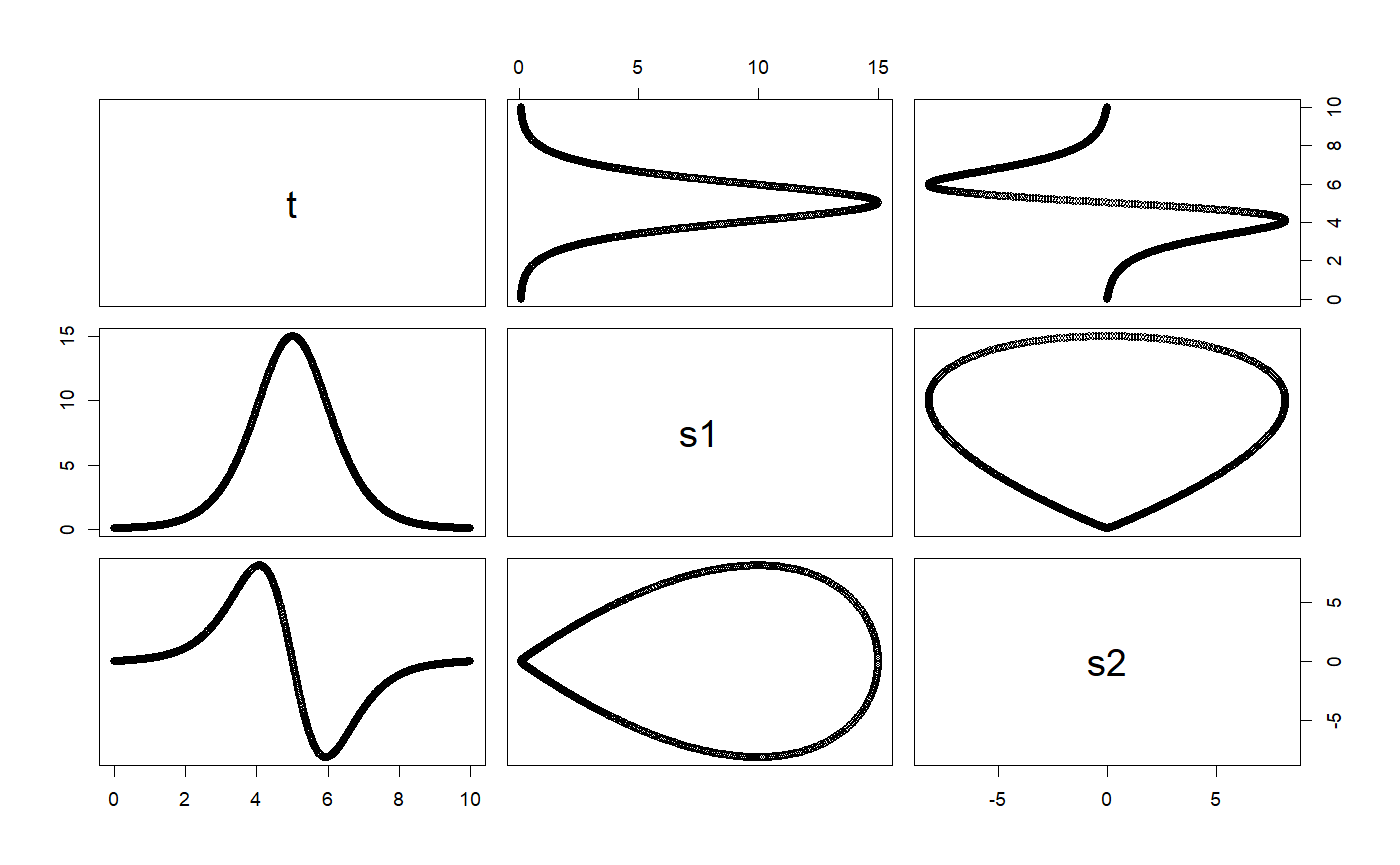
# ++++++++++++++++++++++++++++++++++++++++++++++++++++++++ example: PlanetApp.R # Simulation of Earth orbiting around the SUn using the Euler ODE solver importFromExamples("Planet.R") # source the class PlanetApp <- function(verbose = FALSE) { # x = 1, AU or Astronomical Units. Length of semimajor axis or the orbit # of the Earth around the Sun. x <- 1; vx <- 0; y <- 0; vy <- 6.28; t <- 0 state <- c(x, vx, y, vy, t) dt <- 0.01 planet <- Planet() planet@odeSolver <- setStepSize(planet@odeSolver, dt) planet <- init(planet, initState = state) rowvec <- vector("list") i <- 1 # run infinite loop. stop with ESCAPE. while (getState(planet)[5] <= 90) { # Earth orbit is 365 days around the sun rowvec[[i]] <- list(t = getState(planet)[5], # just doing 3 months x = getState(planet)[1], # to speed up for CRAN vx = getState(planet)[2], y = getState(planet)[3], vy = getState(planet)[4]) for (j in 1:5) { # advances time planet <- doStep(planet) } i <- i + 1 } DT <- data.table::rbindlist(rowvec) return(DT) } # run the application solution <- PlanetApp()#>#>#>#>#>#>select_rows <- seq(1, nrow(solution), 10) # do not overplot solution <- solution[select_rows,] plot(solution)# +++++++++++++++++++++++++++++++++++++++++++++++++++ application: Logistic.R # Simulates the logistic equation importFromExamples("Logistic.R") # Run the application LogisticApp <- function(verbose = FALSE) { x <- 0.1 vx <- 0 r <- 2 # Malthusian parameter (rate of maximum population growth) K <- 10.0 # carrying capacity of the environment dt <- 0.01; tol <- 1e-3; tmax <- 10 population <- Logistic() # create a Logistic ODE object # Two ways of initializing the object # population <- init(population, c(x, vx, 0), r, K) init(population) <- list(initState = c(x, vx, 0), r = r, K = K) odeSolver <- Verlet(population) # select the solver # Two ways of initializing the solver # odeSolver <- init(odeSolver, dt) init(odeSolver) <- dt population@odeSolver <- odeSolver # setSolver(population) <- odeSolver rowVector <- vector("list") i <- 1 while (getTime(population) <= tmax) { rowVector[[i]] <- list(t = getTime(population), s1 = getState(population)[1], s2 = getState(population)[2]) population <- doStep(population) i <- i + 1 } DT <- data.table::rbindlist(rowVector) return(DT) } # show solution solution <- LogisticApp()#>#>#>#>#>#>#>#>#>#>plot(solution)